일반적인 의미의 센서는 하나의 물리량을 다른 물리량으로 변환하여 처리, 전송 또는 후속 변환에 편리한 장치입니다. 일반적으로 첫 번째 양은 물리적이며 직접 측정(온도, 속도, 변위 등)할 수 없으며 두 번째 양은 전기 또는 광학 신호입니다. 측정기 분야의 틈새 시장은 인덕터의 주요 요소인 센서가 차지합니다.
인덕턴스 센서의 작동 원리 및 작동 원리
작동 원리에 따라 유도형 센서가 활성화됩니다. 즉, 작동하려면 외부 발전기가 필요합니다. 주어진 주파수와 진폭의 신호를 인덕터에 제공합니다.
코일의 권선을 통과하는 전류는 자기장을 생성합니다. 전도성 물체가 자기장에 들어가면 코일의 매개변수가 변경됩니다.이 변경 사항을 수정하는 것만 남아 있습니다.
간단한 비접촉 센서는 권선의 가까운 영역에 있는 금속 물체의 모양에 반응합니다. 이것은 코일의 임피던스를 변경하고, 이 변경은 전기 신호로 변환되어야 하며, 비교 회로를 사용하여 임계값의 통과를 증폭 및(또는) 고정해야 합니다.
다른 유형의 센서는 코일의 핵심 역할을 하는 물체의 길이 방향 위치 변화에 반응합니다. 물체의 위치가 변경되면 코일 내부 또는 외부로 이동하여 인덕턴스가 변경됩니다. 이 변화는 전기 신호로 변환되어 측정될 수 있습니다. 이러한 센서의 또 다른 버전은 물체가 외부에서 코일에 접근하는 경우입니다. 이로 인해 접지 효과로 인해 인덕턴스가 감소합니다.
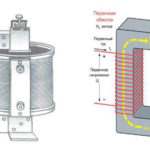
유도 변위 센서의 또 다른 버전은 선형 조정 가능한 차동 변압기(LVDT)입니다. 다음 순서로 만들어진 복합 코일입니다.
- 2차 권선 1;
- 1차 권선;
- 2차 권선 2.
발전기의 신호는 1차 권선에 공급됩니다. 중간 코일에 의해 생성된 자기장은 각각의 2차 코일에서 EMF를 유도합니다(변압기 원리). 코어는 움직일 때 코일 간의 상호 연결을 변경하여 각 권선의 기전력을 변경합니다. 이 변경은 측정 회로에 의해 수정될 수 있습니다. 코어의 길이가 복합 코일의 전체 길이보다 작기 때문에 물체의 위치는 2차 권선의 EMF 비율에 의해 명확하게 결정될 수 있습니다.
동일한 원리로 - 권선 사이의 유도 결합의 변화 - 회전 센서가 구축됩니다.두 개의 동축 코일로 구성됩니다. 신호는 권선 중 하나에 적용되고 두 번째 EMF는 상호 회전 각도에 따라 다릅니다.
작동 원리에서 유도 센서는 디자인에 관계없이 비접촉식임이 분명합니다. 그들은 멀리서 작동하며 제어 대상과 직접 접촉할 필요가 없습니다.
유도형 센서의 장점과 단점
유도형 센서의 장점은 주로 다음과 같습니다.
- 설계 신뢰성;
- 접촉 연결 부족;
- 노이즈의 영향을 줄이고 제어 회로를 단순화하는 높은 출력 전력;
- 고감도;
- 산업 주파수의 교류 전압 소스에서 작동하는 능력.
유도형 센서의 주요 단점은 크기, 무게 및 제조 복잡성입니다. 주어진 매개변수를 가진 권선 코일의 경우 특수 장비가 필요합니다. 또한 마스터 발진기의 신호 진폭을 정확하게 유지해야 할 필요성이 마이너스로 간주됩니다. 그것이 바뀌면 감도의 영역도 바뀝니다. 센서는 교류에서만 작동하기 때문에 진폭을 유지하는 것이 특정 기술적인 문제가 됩니다. 직접(또는 강압 변압기를 통해) 센서를 가정용 또는 산업용 네트워크에 연결하는 것은 불가능합니다. 그 안에서 진폭 또는 주파수의 전압 변동은 정상 모드에서 10%에 도달할 수 있어 측정 정확도를 허용할 수 없습니다. .
또한 측정 정확도는 다음에 의해 영향을 받을 수 있습니다.
- 제3자 자기장(센서의 작동 원리에 따라 센서의 차폐는 불가능함);
- 공급 및 측정 케이블의 타사 EMF 픽업;
- 제조 오류;
- 센서 특성 오류;
- 전체 성능에 영향을 미치지 않는 센서 설치 현장의 백래시 또는 변형;
- 온도에 대한 정확도의 의존성(저항을 포함한 권선의 매개변수 변경).
인덕턴스 센서가 자기장에서 유전체 물체의 출현에 반응하지 못하는 것은 장점과 단점 모두에 기인할 수 있습니다. 한편으로 이것은 적용 범위를 제한합니다. 반면에 모니터링 대상에 먼지, 기름, 모래 등이 있는지 여부를 감지하지 못합니다.
유도형 센서 작동의 단점과 가능한 한계에 대한 지식은 장점을 합리적으로 사용할 수 있도록 합니다.
유도형 센서의 범위
유도형 근접 센서는 종종 리미트 스위치로 사용됩니다. 이러한 장치가 널리 보급되었습니다.
- 보안 시스템에서 창문과 문의 무단 열림에 대한 센서로;
- 원격 역학 시스템에서 장치 및 메커니즘의 최종 위치에 대한 센서로;
- 일상 생활에서 문, 셔터의 닫힌 위치를 나타내는 계획;
- 개체 수를 계산하기 위해(예: 컨베이어 벨트를 따라 이동)
- 기어의 회전 속도를 결정하기 위해 (센서를 통과하는 각 톱니가 충동을 생성함);
- 다른 상황에서.

앵글 엔코더는 샤프트, 기어 및 기타 회전 부품과 앱솔루트 엔코더의 회전 각도를 결정하는 데 사용할 수 있습니다. 또한 이러한 장치는 선형 위치 센서와 함께 공작 기계 및 로봇 장치에 사용할 수 있습니다. 메커니즘 노드의 위치를 정확히 알아야 하는 곳.
유도 센서 구현의 실제 예
실제로 유도 센서의 설계는 다양한 방식으로 구현될 수 있습니다. 가장 간단한 실행 및 포함은 감도 영역에서 금속 물체의 존재를 모니터링하는 2선식 단일 센서에 대한 것입니다. 이러한 장치는 종종 E 자형 코어를 기반으로 만들어 지지만 이것이 근본적인 포인트는 아닙니다. 이러한 구현은 제조하기가 더 쉽습니다.
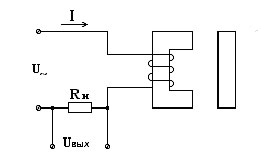
코일 저항이 변경되면 회로의 전류와 부하 양단의 전압 강하가 변경됩니다. 이러한 변경 사항을 커밋할 수 있습니다. 문제는 부하 저항이 중요해진다는 것입니다. 너무 크면 금속 물체가 나타날 때 전류의 변화가 상대적으로 작습니다. 이것은 시스템의 감도와 노이즈 내성을 감소시킵니다. 작으면 회로의 전류가 커지고 더 저항력이 있는 센서가 필요합니다.
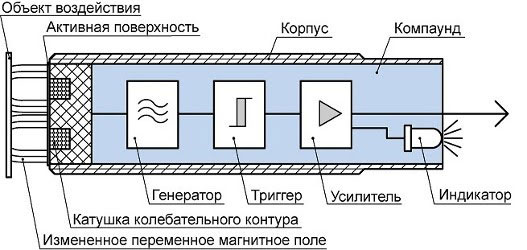
따라서 측정 회로가 센서 하우징에 내장된 설계가 있습니다. 발생기는 인덕터에 공급하는 펄스를 생성합니다. 특정 수준에 도달하면 트리거가 실행되어 상태 0에서 1로 또는 그 반대로 전환됩니다. 버퍼 증폭기는 전력 및(또는) 전압 측면에서 신호를 증폭하고 LED를 켜고(소등) 개별 신호를 외부 회로에 출력합니다.
출력 신호는 다음과 같이 형성될 수 있습니다.
- 전자기 또는 솔리드 스테이트 릴레이 - 0 또는 1 전압 레벨;
- "건조한 접촉" 전자기 릴레이;
- 오픈 컬렉터 트랜지스터 (구조 n-p-n 또는 p-n-p).
이 경우 센서를 연결하려면 세 개의 전선이 필요합니다.
- 음식;
- 공통 와이어(0볼트);
- 신호선.
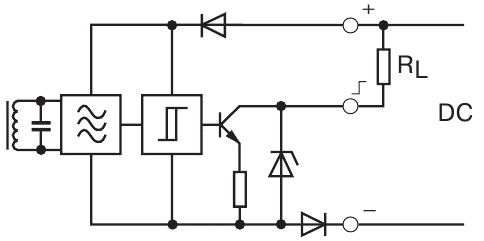
이러한 센서는 DC 전압으로 전원을 공급받을 수도 있습니다. 인덕턴스에 대한 펄스는 내부 발생기에 의해 형성됩니다.
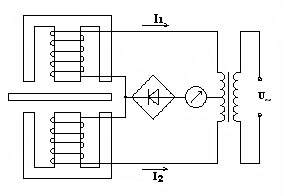
차동 인코더는 위치 모니터링에 사용됩니다. 제어 대상이 두 코일에 대해 대칭이면 두 코일을 통과하는 전류는 동일합니다. 권선이 필드 쪽으로 이동하면 불균형이 발생하고 총 전류는 0이 되지 않고 눈금 중간에 화살표가 있는 표시기로 기록될 수 있습니다. 표시기는 이동의 크기와 방향을 모두 결정하는 데 사용할 수 있습니다. 포인터 장치 대신 위치 변경에 대한 정보를 수신하면 신호를 발행하고 물체를 정렬하기 위한 조치를 취하고 기술 프로세스를 조정하는 등의 제어 체계를 사용할 수 있습니다.

선형 조정 가능한 차동 변압기의 원리에 따라 만들어진 센서는 1차 및 2차 권선이 있는 프레임과 내부에서 움직이는 로드(스프링 장착 가능)인 완전한 구조의 형태로 생산됩니다. 발전기에서 신호를 보내고 2차 권선에서 EMF를 제거하기 위해 전선이 나옵니다. 제어 대상은 로드에 기계적으로 부착될 수 있습니다. 그것은 또한 유전체로 만들 수 있습니다 - 측정을 위해 줄기의 위치만 중요합니다.
고유한 단점에도 불구하고 유도형 센서는 공간에서 물체의 비접촉 감지와 관련된 많은 영역을 닫습니다.기술의 지속적인 발전에도 불구하고 이러한 유형의 장치는 작동이 기본 물리 법칙에 기반하기 때문에 가까운 장래에 측정 장치 시장을 떠나지 않을 것입니다.
유사한 기사: